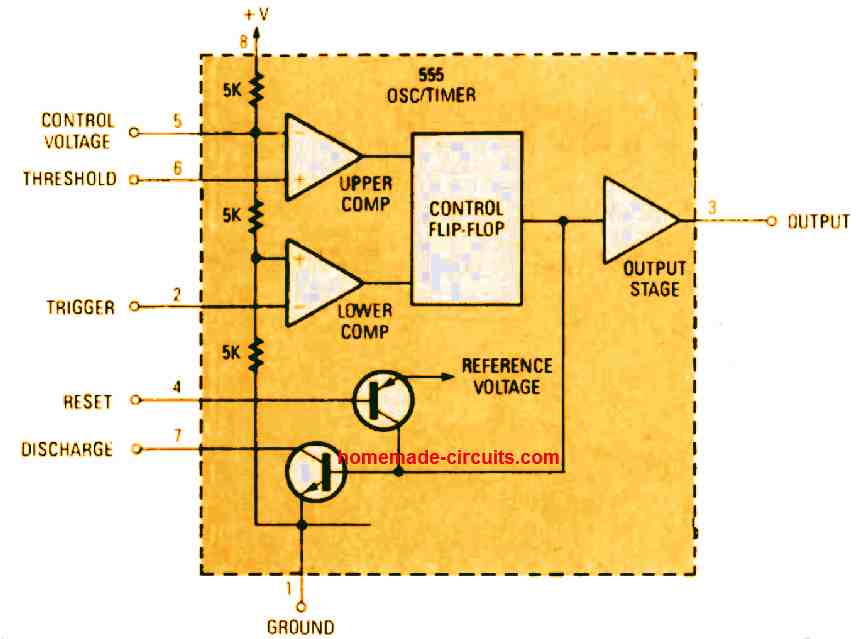
The IC 555 timer is a popular and adaptable integrated circuit that has established itself as a standard in the electronics industry. It is a well-liked option for DIY and […]
Search Results for: 555
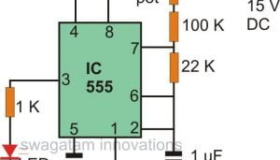
DC Lamp Dimmer Circuit using IC 555
In this post I have explained how to use the control pin#5 of the IC 555 to build a simple PWM controlled DC light dimmer circuit. The proposed DC lamp […]
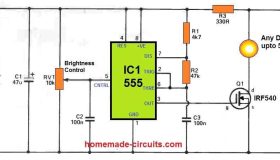
IC 555 Astable Multivibrator Circuits
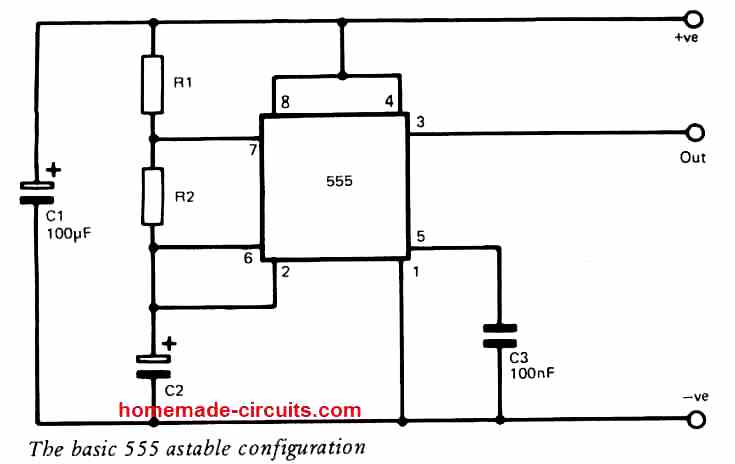
The IC 555 astable multivibrator is a configuration where the IC 555 output continuously switches between an ON state and an OFF state at a given frequency, determined by its […]
Visitor Counter Circuit Using IC 555 and IC 4026
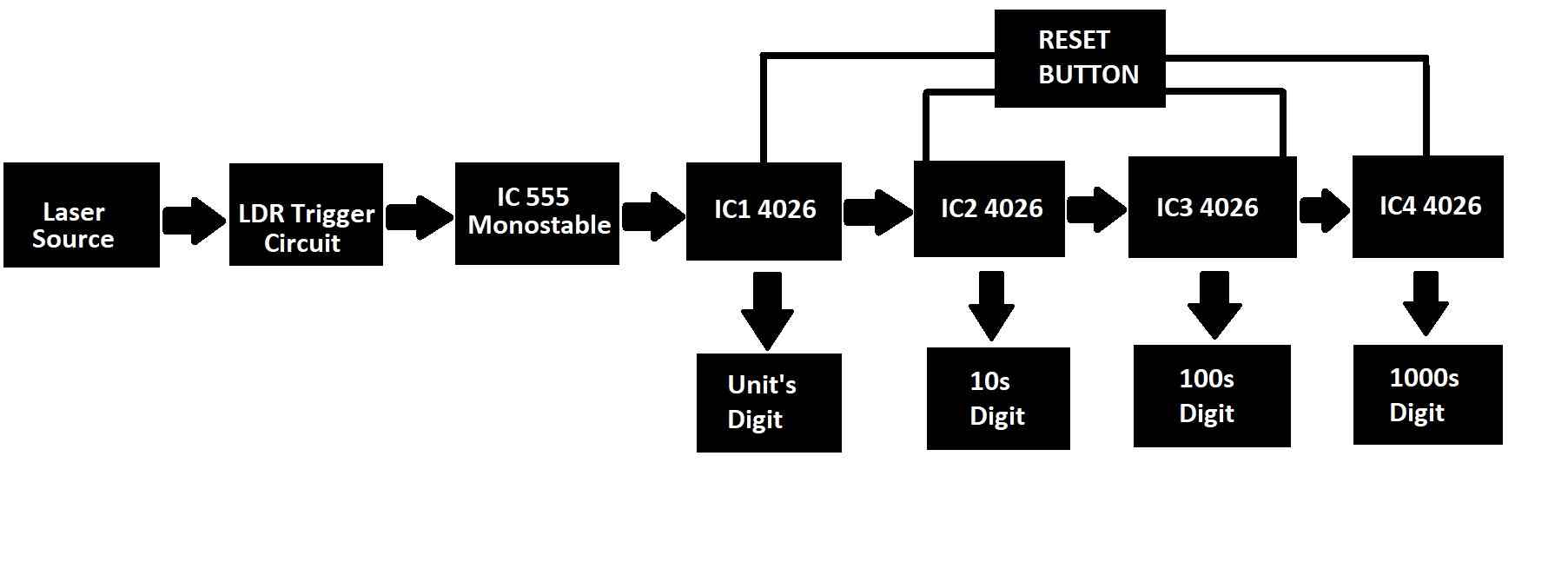
A visitor counter is a machine that counts the of number people who visited a place. Visitor counters are usually installed at the entrance and exit points of commercial buildings […]
7 Interesting IC 555 Siren and Alarm Circuits
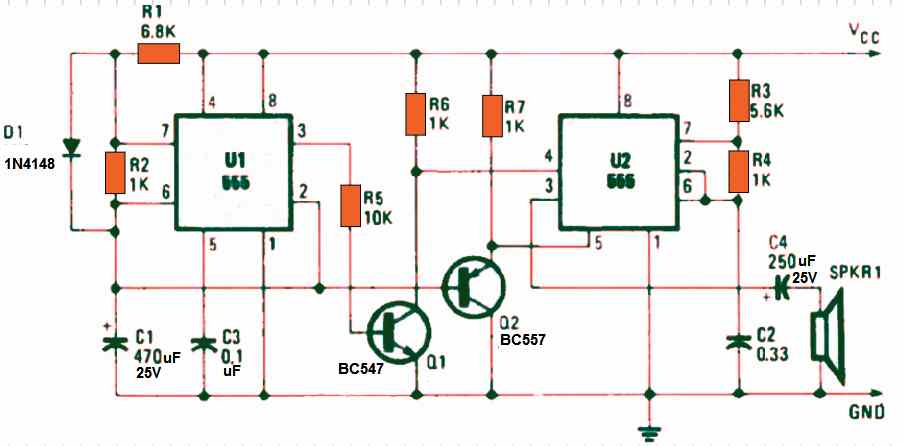
In this post I have explained how to use IC 555 to create 7 interesting siren and alarm sound effect generator circuits. The versatile astable multivbrator configuration of IC 555 […]
10 Simple IC 555 Monostable Circuits Explored
In this post I have explained how IC 555 can be used for making 10 different types of monostable multivibrator circuits, such as one-shot type, debounce preventor, retriggerable type, touch […]